
📌 Вступление
Таким образом, настройка ПИД-регулятора является важной частью системы управления. Хотя концепция проста, математическая основа ПИД-регулирования сложна, и достижение оптимальной производительности предполагает выбор специфических для процесса значений для ряда взаимодействующих параметров.
📌 Методы настройки ПИД-регулятора
Процесс нахождения этих значений называется «настройкой». При этом важно учитывать особенности конкретного объекта управления.
Когда ПИД-регулятор настроен оптимально, устройство минимизирует отклонение от заданного значения и быстро реагирует на возмущения или изменения заданного значения, но с минимальным перерегулированием.
Хотя многие контроллеры обеспечивают возможности автоматической настройки, понимание методов настройки ПИД-регулятора поможет достичь оптимальной производительности. Подробнее об основах работы ПИД-регулятора можно прочитать в статье
Как настроить ПИД-регулятор: простое объяснение работы и принципов.
Когда ПИД-регулятор настроен оптимально:
- минимизируется отклонение от заданного значения
- система быстро реагирует на возмущения
- перерегулирование минимально
Хотя многие контроллеры имеют автоматическую настройку, понимание методов настройки позволяет добиться лучшего результата.
🔷 Методы настройки ПИД-регулятора
В частности, можно выделить несколько подходов к настройке регуляторов:
- ручная настройка
- эвристические методы
- автоматическая настройка
- адаптивная настройка
Ручная настройка. Например, первый способ — это использование метода Циглера–Никольса (в интернете можно встретить несколько вариантов написания этих фамилий). Более серьезный подход предусматривает сбор данных и использование более продвинутых методов, которые позволяет лучше учесть многие аспекты объекта управления. Подробные примеры настройки и проверки качества работы ПИД-регулятора представлены в статье Как проверить качество настройки ПИД-регулятора: переходный процесс и критерии.
Эвристические методы настройки. С другой стороны, эвристические методы настройки основаны на практическом опыте. Эвристический подход сводится к наблюдению за качеством работы и внесением изменений в настройки. Большинство объектов меняют свои параметры в процессе эксплуатации. Но здесь нужен хороший опыт и понимание, как влияет на качество P, I и D составляющие.
Автоматическая настройка. Кроме того, многие промышленные средства имеют встроенные алгоритмы. Часто они не очень хорошо настраивают, но 80-90% дают приемлемый результат. Есть также специальное программное обеспечение для настройки, но это рационально только для больших промышленных предприятий.
Адаптивная настройка. В свою очередь, адаптивная настройка подразумевает постоянный анализ работы регуляторов и внесение изменений по определенным критериям в течение времени работы. Особенно это актуально для объектов управления, у которых в процессе работы меняются динамические свойства.
⚠️ Важное замечание
Каждый процесс имеет уникальные характеристики, даже если оборудование по сути идентично.
Уровень в скважине может меняться, температура и вязкость тоже.
Поток воздуха вокруг печей будет меняться, температура окружающей среды будет изменять плотность и вязкость жидкости, а барометрическое давление будет меняться от часа к часу.
Далее рассмотрим классический метод настройки ПИД-регулятора.
Настройки ПИД-регулятора (в основном, коэффициент усиления, применяемый к поправочному коэффициенту, а также время, используемое в интегральных и дифференциальных вычислениях) должны быть выбраны с учетом этих локальных различий.
📌 Классический метод настройки ПИД-регулятора Циглера–Никольса
1. Если система была уже настроена, то запишите последние настройки и зафиксируйте текущую частоту.
Когда технологический процесс достаточно устойчив и не ожидается сбоев на установке, переведите регулятор на ручной режим. Установите D (дифференциала) на 0, а I (интеграл) на максимальное время(коэффициент интегрирования 0).
2. Увеличьте P составляющую в 2 раза, переведите в автоматический режим и смотрите за изменение частоты ПЧ.
3. Если колебание не появляется, повторите пункт 2. Таким образом, ваша цель добиться автоколебаний. Частота на табло должна меняться с одинаковым периодом. Если частота достигла максимального значения, значит у вас очень большой коэффициент, его надо уменьшить. После достижения автоколебаний необходимо зафиксировать Р* при котором были достигнуты автоколебания. Также необходимо измерить период автоколебаний T*.
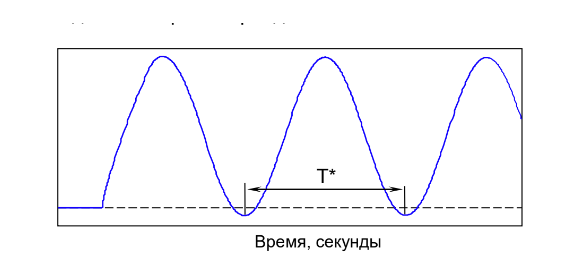
5. Для регулятора Р+I (пропорциональный +интегральный) установите интеграл I на период 0,82 (т.е. умножить 0,82 на время периода). Увеличьте в 2 раза пропорциональность. Период увеличится на 43%. Каждый пик должен составлять ½ амплитуды предыдущего пика. Это называется ¼ затухания амплитуды. Подстройте пропорциональность, если требуется больше или меньше затухания.
6. Для регулятора P+I+D (дифференциальный). Установите I= периоду х 0,5. Установите D= периоду х 0,125. Увеличьте в 2 раза пропорциональность. Период снизится на 15%. Отрегулируйте пропорциональность, если требуется большее или меньшее затухание.
7. Помните, что безопасные значения: большая I и небольшая D. Эти инструкции для регуляторов регулируются минутами на повтор. Некоторые изготовители используют обратную зависимость для I и D, поэтому большое значение становится малым и наоборот.
8. Если измерение с шумом дифференциальную составляющую обычно невозможно использовать. Никогда ни при каких обстоятельствах не устанавливайте дифференциальную больше интеграла.
В этом алгоритме один вариант коэффициентом пересчета, в интернете и книгах можно найти другие варианты.
Например, для расчета параметров можно использовать следующие значения:

📌 Метод 2: настройка ПИД-регулятора по кривой разгона
Альтернативно, можно использовать второй метод настройки.
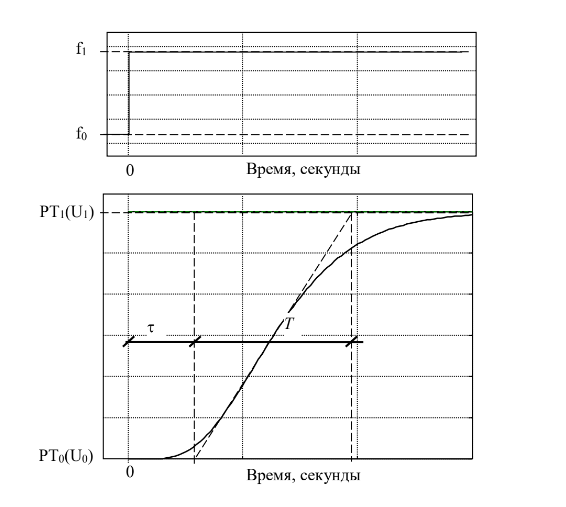
Во втором варианте метода Циглера–Никольса используется реакция объекта на ступенчатое изменение управляющего воздействия. Т.е необходимо перевести систему в ручной режим.
Дождаться устойчивого значения показаний датчика давления. Желательно около той точки давления, которая будет использоваться в дальнейшем в работе.
Потом изменить частоту ПЧ на 10% или 20%. И снять показания датчика давления во времени. Например, снять видео с секундомером с помощью телефона. Если датчик без индикатора, то можно подключить тестер к входным клеммам ПЧ куда подключен датчик давления.
Построить примерный график. Эту характеристику объекта обычно называют кривой разгона. На графике провести касательную и определить τ и Т.
Проснувшись однажды утром после беспокойного сна, Грегор Замза обнаружил, что он у себя в постели превратился в страшное насекомое.

Однако регуляторы, настроенные методом Циглера–Никольса, редко бывают оптимальными. Как правило, требуется дополнительная подстройка их параметров. Однако этот старый метод Циглера–Никольса является самым популярным. Многие производители до сих пор рекомендуют их для настройки регуляторов.
Коэффициент k отражает чувствительность объекта и рассчитывается по формулам:
- Для давления и безразмерных решений:
k = ((PT1 – PT0)/ (0,5(PT1 + PT0))/ ((f1 – f0)/ (0,5(f1 + f0))
2. Для напряжения или размерных решений:
k = ((U1 – U0)/ (0,5(U1 + U0))/ ((f1 – f0)/ (0,5(f1 + f0))
Или в упрощённой форме:
k = (PT1 – PT0)/ (f1 – f0) или k = (U1 – U0)/ (f1 – f0)
Обозначения:
- PT1, PT0 — давление после и до изменения частоты
- U1, U0 — напряжение после и до изменения частоты
- f1, f0 — частота ПЧ после и до эксперимента
Выбор формулы зависит от того, как будет подставляться значение P в реальный регулятор:
- первый вариант — для безразмерных решений
- второй вариант — для размерных.
Таким образом, настройка ПИД-регулятора требует комплексного подхода. В результате правильного выбора параметров можно добиться устойчивой и эффективной работы системы.
📌 Дополнительно по теме
Для более полного понимания основ ПИД-регулирования и структуры обратной связи, рекомендуем также ознакомиться с:
• Основы ПИД-регулирования: простое объяснение
• Проверка качества настройки по переходному процессу
📚 Рекомендуемая литература по настройке ПИД-регуляторов
Для более детального изучения методов настройки и расчета параметров регуляторов можно использовать следующие источники:
• Л. М. Полоцкий, Г. И. Лапшенков — «Автоматизация химических производств. Теория, расчет и проектирование систем автоматизации»
• В.В. Денисенко — «Компьютерное управление технологическим процессом, экспериментом, оборудованием». Москва: Горячая линия – Телеком, 2009
Материал подготовлен при участии доцента кафедры автоматизации производственных процессов и электротехники Белорусского государственного технологического университета Д.А. Гринюка.



