
Эффективность работы насоса в системе поддержания постоянного напора
Эффективность работы насоса в системе поддержания постоянного напора складывается из трех основных групп факторов:
- технических характеристик самого насоса;
- качества системы управления;
- гидравлики трубопроводной сети.
В системах с переменной нагрузкой особенно важно учитывать различие между дросселированием и частотным регулированием, так как именно способ управления определяет потери энергии и итоговый КПД системы. В таких случаях часто применяют подход, основанный на частотном регулировании насоса: сравнение с дросселированием и экономия энергии.
Рисунок 1 — Устройство центробежного насоса и электродвигателя
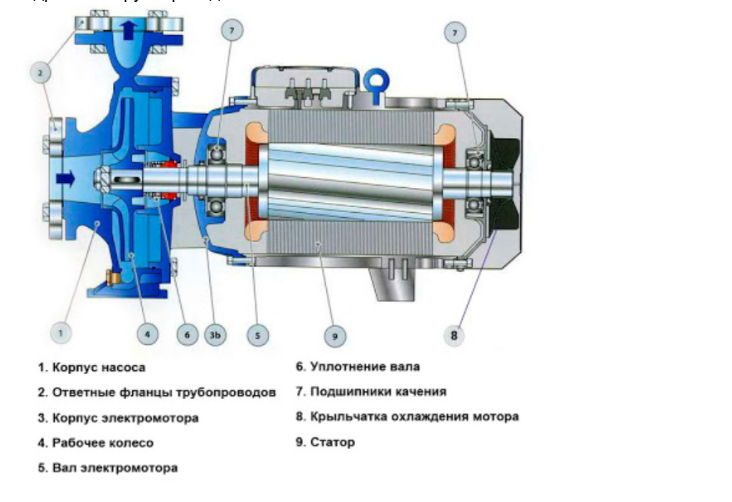
Характеристики насосного агрегата (КПД насоса)
Это способность насоса преобразовывать энергию двигателя в энергию потока жидкости.
- Гидравлический КПД:
учитывает потери на трение, вихреобразование и местные сопротивления внутри проточной части насоса (рабочее колесо, корпус). Чем чище и обтекаемее форма, тем выше эффективность. - Объемный КПД:
характеризует потери жидкости через зазоры внутри насоса (протечки). Минимальные зазоры повышают эффективность. - Механический КПД:
учитывает потери на трение в подшипниках и уплотнениях вала.
Рисунок 2 — Зависимость частоты n, КПД, cos ϕ от нагрузки P2 для асинхронного двигателя
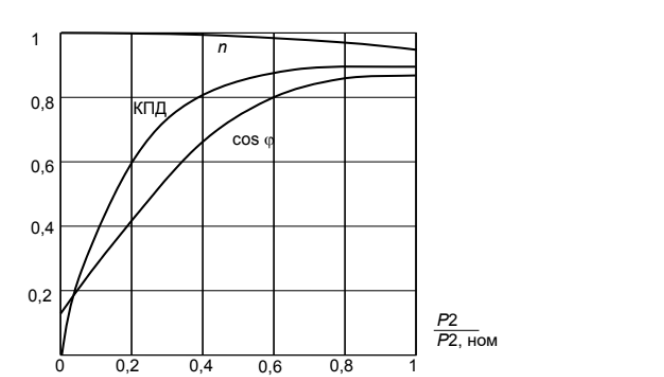
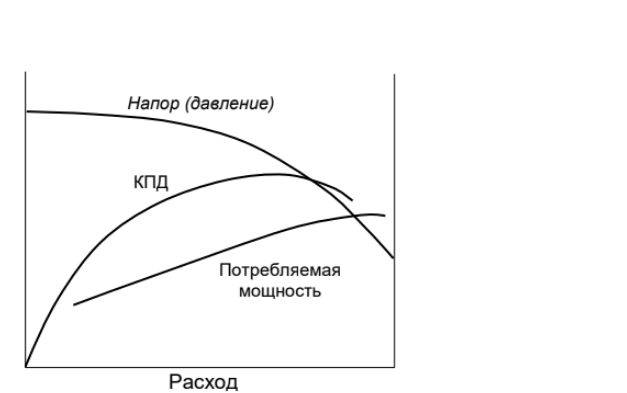
Рисунок 3 — Зависимость напора, КПД, потребляемой мощности от расхода для насоса
Эффективность системы управления (регулирование напора)
Для обеспечения постоянства напора при изменяющемся расходе нужно регулировать работу насоса. От способа регулирования напрямую зависит общая энергоэффективность системы.
- Частотное регулирование (наилучший вариант):
изменение скорости вращения двигателя с помощью частотного преобразователя (ЧРП). При снижении расхода напор остается заданным, а потребляемая мощность падает в кубической зависимости от оборотов (закон пропорциональности). Это самый энергоэффективный способ. - Дискретный вариант:
насос накачивает жидкость в промежуточную емкость, периодически включаясь, когда уровень достиг минимального допустимого значения, и выключаясь, когда уровень достиг максимального значения. Давление имеет большие отклонения от желаемого, дополнительные расходы электроэнергии на запуск насоса; дополнительные расходы электроэнергии из-за перемежения рабочей точки при повышении уровня в промежуточной емкости, и как следствие — снижение КПД и расхода насоса. - Регулирование дросселированием (худший вариант):
постоянная скорость насоса, а напор гасится задвижкой. Насос работает в неоптимальной точке, энергия тратится впустую на преодоление сопротивления задвижки. КПД системы резко падает. - Рециркуляция (перепуск):
часть воды сбрасывается обратно во всасывающий трубопровод. Крайне неэффективно, так как насос постоянно работает на полную мощность.
Гидравлическая совместимость с сетью (рабочая точка)
Даже самый хороший насос будет неэффективен, если он неправильно подобран.
- Положение рабочей точки:
насос должен работать в области максимального КПД (Optimum Efficiency Point — O.E.P.). Если система требует напора, сильно отличающегося от номинального, КПД падает. - Запас по напору (избыточность):
если насос выбран с большим запасом по напору, система вынуждена постоянно его гасить (дросселированием или обточкой колеса), что снижает эффективность. Даже частотное управление в некоторых случаях не может исправить ситуацию.
Конструктивные особенности насоса
- Материалы и покрытия:
влияют на шероховатость внутренних стенок. Гладкие поверхности (полированная нержавейка, композиты) снижают гидравлическое трение. - Тип рабочего колеса:
закрытое колесо обычно эффективнее открытого для чистых жидкостей, но открытое лучше для загрязненных сред (меньше засоряется, сохраняя стабильность работы).
Качество обратной связи (датчики)
- Точность датчика давления:
система поддерживает ровно тот напор, который видит датчик. Если датчик дает ошибку, эффективность теряется (система либо недодает напор, либо перерасходует энергию). - Место установки датчика:
лучшая эффективность достигается, если датчик установлен в точке, где требуется поддержание давления, а не сразу на выходе из насоса (это компенсирует потери в трубопроводе).
Особую сложность представляют системы с несколькими потребителями. В этом случае приходится искать компромиссное место установки датчика или использовать несколько датчиков.
📌 Итоговая формула эффективности системы:
Общая эффективность = (КПД насоса) × (КПД двигателя) × (КПД частотного преобразователя) × (Коэффициент режима работы)
Что влияет на КПД при частотном управлении
Отдельно стоит рассмотреть, как частотное управление влияет на эффективность работы насоса.
Эффективность (КПД) системы поддержания давления с частотно-регулируемым приводом (ЧРП) зависит не от одного фактора, а от целого комплекса потерь в разных элементах системы:
от преобразователя частоты до гидравлической сети. Главное преимущество ЧРП — снижение потерь на дросселирование, но и у него есть свои «узкие места».
Тип регулирующего устройства:
- Если для изменения скорости используется не ЧРП, а, например, гидромуфта, потери могут быть катастрофическими.
- При снижении скорости до 50% КПД гидромуфты падает до 40-50% , в то время как у ЧРП он остается практически неизменным (около 96%) во всем рабочем диапазоне.
Как было отмечено выше, на КПД влияют ряд основных факторов: потери в самом преобразователе частоты, в электродвигателе и в насосе с сетью.
Неверно заданные параметры или отсутствие согласования с характеристиками насоса могут приводить к смещению рабочей точки и снижению эффективности, что подробно разбирается в материале настройка частотного преобразователя для насоса: пошаговое руководство.
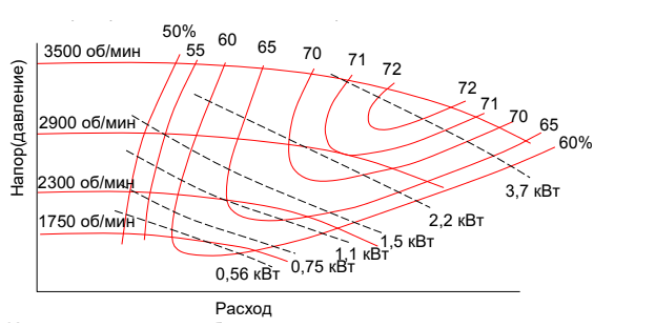
Рисунок 4 — Характеристики центробежного насоса при различных частотах вращения
Связь потерь в преобразователе частоты (ПЧ) и двигателе
Преобразователь частоты как источник потерь
Даже современный ЧРП не идеален: его КПД в номинальном режиме обычно составляет 95–97%, то есть 3–5% электроэнергии теряется в силовых полупроводниках и вспомогательных цепях. У разных производителей КПД может немного отличаться, но разница невелика.
Коэффициент мощности (cos ϕ)
- Двигатели, напрямую подключенные к сети, имеют низкий cos ϕ при малых нагрузках, который улучшается с увеличением нагрузки.
- Двигатели с частотно-регулируемым приводом поддерживают высокий коэффициент мощности близкий к единице на входе, почти независимо от скорости и нагрузки. Это связано с подачей реактивного тока через шину постоянного тока.
- Таким образом, потери в ПЧ могут компенсироваться улучшением КПД двигателя, так как преобразователь обеспечивает cos ϕ ≈ 1.
Качество выходного напряжения (гармоники)
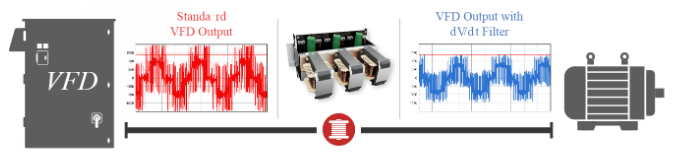
ПЧ формирует не идеальную синусоиду, а высокочастотные импульсы. Это вызывает высшие гармоники, которые повышают нагрев обмоток и стали двигателя. Проблему можно снизить с помощью фильтра между двигателем и преобразователем (рисунок 5).
Гидравлические потери и режим работы насоса
Исключение дросселирования
Главный источник экономии при использовании ЧРП — отказ от регулирования задвижкой. При дросселировании избыточный напор гасится на задвижке, что ведёт к прямым и значительным потерям энергии. ЧРП позволяет поддерживать точное давление, нужное системе, и избегать этих потерь.
Отклонение от точки максимального КПД насоса
У каждого насоса есть оптимальная рабочая точка с максимальным КПД. При изменении частоты вращения рабочая точка смещается. Если система имеет высокое статическое давление (например, подъем воды на высоту при низком расходе), КПД насоса может снижаться.
- Закон подобия: зона максимального КПД при частотном регулировании смещается вместе с рабочей точкой, что делает ЧРП гораздо эффективнее дросселирования.
Характеристики сети
Форма кривой сети — гидравлическое сопротивление труб, перепад высот — определяет рабочую точку насоса при любой частоте вращения.
📌 Дополнительно по теме
📚 Дополнительные материалы
Материал подготовлен при участии доцента кафедры автоматизации производственных процессов и электротехники Белорусского государственного технологического университета Д.А. Гринюка.



