Частотное регулирование насоса vs дросселирование: сравнение потерь и эффективности
Частотное регулирование насоса и дросселирование — два основных способа управления расходом. Однако их влияние на КПД и энергопотребление системы существенно отличается.
Различные режимы работы насосной установки влияют на общую эффективность системы, что рассматривается в контексте факторов, определяющих эффективность работы насоса: от чего зависит КПД системы.
Сравнение потерь: дросселирование vs частотное регулирование
Прежде всего, рассмотрим наглядный пример, когда требуется снизить расход насоса.
Задача: снизить расход с Q1 до Q2, но сохранить напор H1.
- Дросселирование:
Вы прикрываете задвижку. Насос продолжает работать с той же скоростью, и его рабочая точка смещается вверх по характеристике. В результате получается меньший расход Q2, но избыточный напор H2. Этот напор «гасится» на задвижке, поэтому КПД насоса падает. - Частотное регулирование насоса:
Вы снижаете частоту вращения. В этом случае насос формирует новую характеристику. Рабочая точка смещается по кривой сети, и вы получаете нужные параметры: расход Q2 и напор H1. Таким образом, это позволяет не только достичь технологической цели, но и зачастую повысить КПД самого насоса для данного режима.В итоге, несмотря на потери в самом преобразователе, частотное регулирование оказывается гораздо выгоднее, чем простое дросселирование, особенно при переменной нагрузке.
👉 Следовательно, частотное регулирование насоса позволяет избежать лишних потерь энергии.
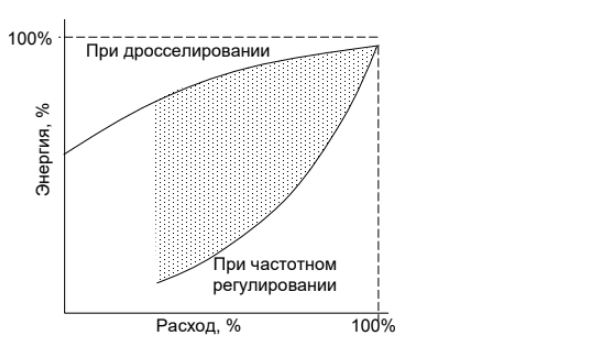
На рисунке 1 заштрихованная область показывает экономию мощности при использовании частотно-регулируемого привода для заданного расхода.
Однако важно учитывать, что частотное регулирование насоса не всегда обеспечивает максимальную экономию.
При работе на почти полной скорости существует точка пересечения, где управление с помощью частотно-регулируемого привода может потреблять больше энергии, чем управление с фиксированной скоростью с помощью дроссельной заслонки. Это связано с тем, что потери в частотно-регулируемом приводе превышают экономию от снижения скорости.
Больше всего экономия применения частотного регулирования будет наблюдаться в системах с переменной нагрузкой. При постоянной работе на номинальной характеристике насоса (особенно если он хорошо подобран под сопротивление гидравлической системы) эффективность применения ПЧ не столь очевидна. Выгода возможна только за счет того, что ПЧ может уменьшить потери в двигателе за счет улучшения коэффициента мощности.
👉 Тем не менее, такие режимы на практике встречаются редко.
На рисунке 2 изображено сравнение работы насоса при дросселировании и частотном регулировании: изменение КПД и потребляемой мощности.
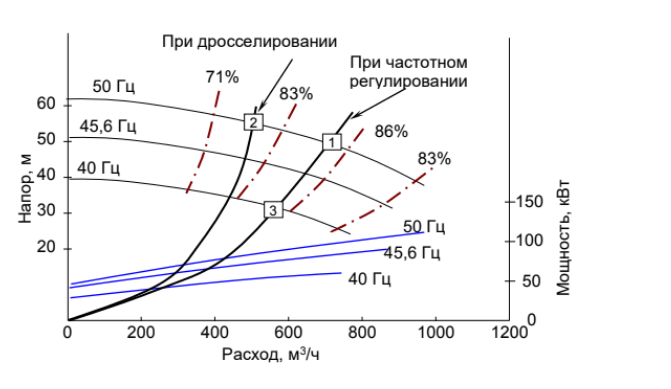
- Исходная рабочая точка насоса с фиксированной скоростью (50 Гц) находится в точке (1), где кривая системы пересекает профиль напора-расхода при расходе 700 м3 / ч, при этом КПД составляет около 85,1%.
- Если выходная мощность регулируется с помощью дросселя, кривая системы фактически смещается влево (точка 2), где КПД насоса снижается до 78%.
- И наоборот, если выходная мощность регулируется с помощью регулятора скорости, рабочая точка смещается вниз по кривой системы (точка 3), при этом КПД насоса незначительно снижается.
👉 Следовательно, частотное регулирование насоса более эффективно.
В системах с высоким статическим напором, в частности, в насосных установках, например, в насосах подачи питательной воды в котлы или в системах с высоким напором, где насос должен преодолевать сопротивление подъему воды до начала потока, преимущества использования частотно-регулируемых приводов будут снижены. Это связано с тем, что для преодоления дополнительного сопротивления, обусловленного высоким статическим напором, необходимо поддерживать более высокие скорости. Учитывайте это при любых расчетах (включая законы подобия) и обратитесь к поставщику насосов за дополнительной информацией о том, как учитывать статический напор.
Где применение частотного регулирования наиболее эффективно
Наиболее эффективно частотное регулирование насоса применяется в системах:
- отопления
- вентиляции и кондиционирования
- водоснабжения
- технологических процессов
👉 В этих системах требования к расходу изменяются.
Влияние гидравлики на эффективность работы насоса
Системы в гидроэнергетике обычно проектируются с учетом пиковых нагрузок. Это неизбежно приводит к высокой доле работы в режиме частичной нагрузки. Производители систем иногда учитывают этот факт. В некоторых случаях они проектируют свои агрегаты таким образом, чтобы оптимальная эффективность составляла около 70 процентов от расхода.
Поэтому при модернизации существующих установок или проектировании новых пользователям следует обращать внимание на то, где находится оптимальная эффективность при выборе используемого насоса. Зная профиль частичной нагрузки вашего объекта, легко определить, имеет ли такой выбор смысл для вашей установки.
Таким образом, частотное регулирование насоса позволяет лучше адаптироваться к переменным режимам работы.
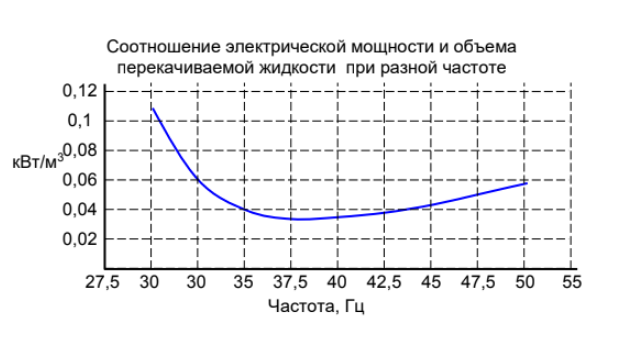
Минимум энергопотребления в системе насоса
Эффективность использования электрической энергии для перекачивания жидкости обычно имеет минимум. Он зависит от правильного выбора насоса, характеристик двигателя и статической характеристики нагрузки (рисунок 3).
Настройка частотного регулирования насоса
Настройка частотного регулирования насоса начинается с выбора закона управления — скалярного (U/f) или векторного. Это напрямую влияет на общий КПД системы, но воздействие распределено по-разному.
Способ управления влияет на:
- потери в преобразователе
- эффективность двигателя
- работу насоса в различных режимах
Главное отличие заключается в том, как каждый метод формирует напряжение на двигателе и учитывает его реальное состояние.
При внедрении частотного управления важно учитывать не только сам принцип регулирования скорости, но и корректную настройку оборудования, так как ошибки в параметрах преобразователя напрямую влияют на стабильность давления и расхода. Эти аспекты
подробно рассматриваются в настройке частотного преобразователя, где пошагово разбирается конфигурация насосной системы.
Потери в частотном преобразователе (ПЧ)
Здесь разница не в величине потерь при номинальной нагрузке, а в их структуре и зависимости от режима.
Коммутационные потери
Коммутационные потери: Исследования показывают, что преобразователи, использующие упрощенные (близкие к скалярным) методы формирования напряжения, могут иметь коммутационные потери в транзисторах как минимум на 25% меньше, чем аналоги с векторными модуляторами . Это связано с более простым алгоритмом переключения ключей. Однако на общем КПД преобразователя (который и так высок) эта разница сказывается незначительно.
Гармонический состав (качество напряжения)
Оба метода используют широтно-импульсную модуляцию (ШИМ), которая создает высшие гармоники в выходном напряжении. Эти гармоники вызывают дополнительные потери в двигателе (нагрев). Хотя спектр гармоник может немного отличаться , основной вклад в потери от несинусоидальности вносит сам факт использования ШИМ, а не конкретный закон управления.
Влияние на потери в двигателе и работу насоса
Это ключевое различие. От того, насколько эффективно реализовано частотное регулирование насоса, зависит сколько энергии будет потрачено с пользой, а сколько уйдет в потери.
Скалярное управление
Это самый простой и распространенный метод.
Он:
- эффективен на номинальной скорости
- снижает КПД на низких частотах
- может вызывать перегрев
При переменной нагрузке скорость двигателя изменяется из-за скольжения, что снижает точность и эффективность.
В базовом варианте поддерживает постоянным отношение напряжения к частоте (U/f) . Он как бы «предполагает», что двигатель работает в идеальных условиях, и не отслеживает его реальное состояние. Это влияет на КПД двигателя. При номинальной скорости работа будет эффективна, но при низких скоростях КПД двигателя может существенно падать. Из-за влияния активного сопротивления обмоток падает магнитный поток, а значит, и момент на валу. Чтобы хоть как-то это компенсировать, приходится искусственно завышать напряжение на низких частотах (IR-компенсация), что может привести к перегреву двигателя и дополнительным потерям.
При переменной нагрузке скорость двигателя будет «плавать» в зависимости от нагрузки из-за скольжения. Преобразователь не подстраивается под это, что приводит к отклонению от расчетной рабочей точки и снижению эффективности. Правда это не имеет значение, если использовать преобразователь в контуре поддержания давления, температуры или другого физического параметра с использованием внутреннего или внешнего ПИД-регулятора. Обратная связь с помощью ПИД-регулятора по внешнему параметру найдет нужную скорость.
Векторное управление
Это более сложный и точный метод (остановимся на самом рациональном варианте векторного управления для насосов – бездатчиковым).
Он:
- поддерживает высокий КПД на всех режимах
- снижает потери энергии
- обеспечивает высокий момент на низких оборотах
Преобразователь постоянно вычисляет положение магнитного потока ротора и разделяет ток статора на две составляющие: создающую поток и создающую момент (как в двигателе постоянного тока). Это позволяет управлять моментом и скоростью независимо и очень точно. С КПД двигателя в этом случае будет практически независеть от чатоты. ПЧ подает ровно столько тока для создания магнитного поля, сколько нужно в данный момент, не перемагничивая двигатель и не создавая лишних потерь. Это особенно важно при частичных нагрузках, где векторное управление дает заметную экономию энергии (до 60% в некоторых случаях).
Также будет высокий момент на низких скоростях. Векторное управление позволяет двигателю развивать полный (или даже повышенный) момент с самых малых оборотов. Это критически важно, если система должна, например, страгивать насос с вязкой жидкостью или работать в области низких подач.
Точность поддержания будет выше скалярного можно добиться только с применением датчика скорости. Но как было сказано выше для скалярного управления это точность не так нужна когда ПЧ вместе с двигателем является исполнительным механизмом для ПИД-регулятора. Использование ПЧ с датчиком скорости может понадобиться только в отдельных случаях, когда потребуется хорошая динамика для поддержания заданного давления с помощью насоса.
В результате частотное регулирование насоса становится максимально эффективным.
Итог: выбор режима управления
Если подвести итог, можно сделать следующие рекомендации:
- Для простых систем (один насос, стабильные характеристики сети, не требуется работа на очень малых оборотах) — подходит скалярное управление. Для большинства простых систем разница в итоговом КПД между скалярным и векторным управлением будет минимальной. Скалярное управление с квадратичной (насосной) характеристикой U/f специально оптимизировано для таких задач и позволяет экономить энергию за счет снижения момента на низких частотах. Его простота и надежность здесь являются преимуществом. Кроме этого такая система будет «тормазнутой» из-за более низких динамических свойств скалярного управления. Переходные процессы, которые будут возникать под действием возмущений не будут такими резкими и потери будут меньше чем при использовании векторного управления.
Скалярный режим следует использовать, когда один преобразователь будет работать на несколько двигатей.
- Для систем с претензиями (с высоким статическим напором, переменной вязкостью, несколькими насосами, требованием точного поддержания давления на очень малых расходах) векторное управление может дать прирост общего КПД системы. Оно обеспечит работу двигателя в оптимальном режиме с минимальными потерями, особенно на низких скоростях, и гарантирует, что насос будет создавать ровно тот напор, который заказан регулятором, не тратя лишней энергии на преодоление неучтенных факторов.
Таким образом, выбор между скалярным и векторным управлением — это компромисс между простотой/ценой и точностью/эффективностью в сложных условиях.
👉 В большинстве случаев частотное регулирование насоса с правильно выбранным режимом управления дает максимальную экономию энергии.
📌 Дополнительно по теме
📚 Дополнительные материалы
Материал подготовлен при участии доцента кафедры автоматизации производственных процессов и электротехники Белорусского государственного технологического университета Д.А. Гринюка.



