
📌 Вступление
Переходный процесс ПИД-регулятора — это один из основных способов оценки качества настройки системы управления. Анализируя переходный процесс ПИД-регулятора, можно определить устойчивость, быстродействие и наличие перерегулирования.
📌 Метод проверки
В трубопроводе резко открыть кран на определенную величину, которая позволяет увидеть отклонение на приборе измерения давления или тестере измерения напряжения. Большие отклонения не нужны тоже. Записать видео и построить график переходного процесса. Если настройки хорошие, то будет один из двух вариантов графика что показаны ниже.
Ниже под каждым из вариантом графиков написаны пояснения к ним.
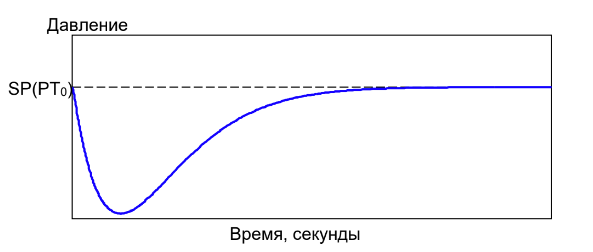
Хороший вариант настроек. Выходной параметр при воздействии возмущения отклонился и вернулся к исходному значению. Время от начала воздействия до максимального отклонения больше 3-4 раза, чем время от момента максимального отклонения до возврата к сигналу задания SP(PT0). Такие настройки имеют хороший вариант по быстродействию и запасу устойчивости.
Переходной процесс с еще одним вариантом хороших настроек. Важно чтобы первое отклонение А1 было больше чем в 2 раза за второе А2.
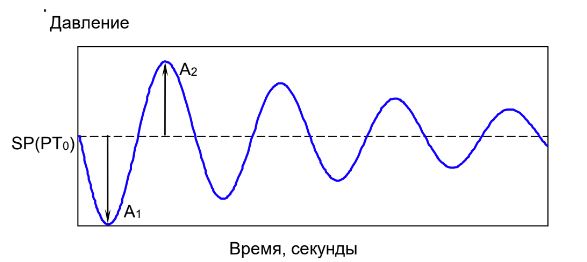
Длительные колебания с небольшой уменьшением амплитуды говорит о малом запасе по устойчивости. Здесь А2 уменьшилось ненамного по сравнению с А1. Это будет приводить к дополнительным потерям в двигателе. Есть вероятность, что при изменении динамических или статических параметров объекта управления система станет неустойчивой.
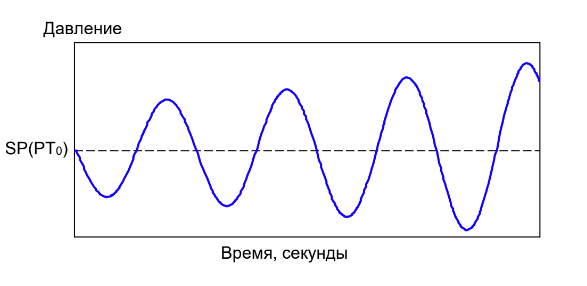
Такой переходной процесс является неустойчивым, может привести к авариям. Здесь А2 уменьшилось ненамного по сравнению с А1. Однако из-за некоторых нелинейных свойств может постоянно колебаться. Это будет приводить к дополнительным потерям в двигателе. Настройки надо изменять.
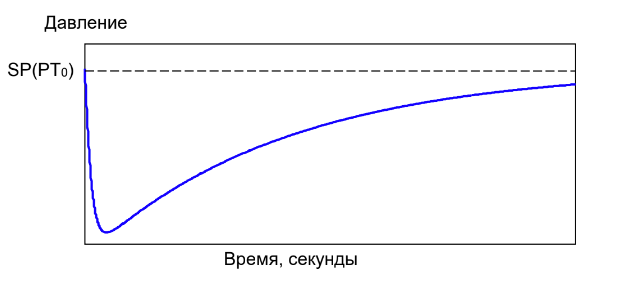
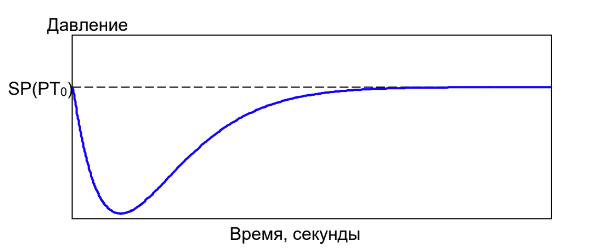
Такой переходной процесс получается, если настройки далеки от идеальных. Признак – после возмущения система быстро отклонилась, а затем начала медленно возвращаться к сигналу задания. Большой запас по устойчивости, но система будет медленно возвращаться с сигналу задания (SP(PT0)) после возмущений. Время интегрирования большое.
📌 Важное замечание
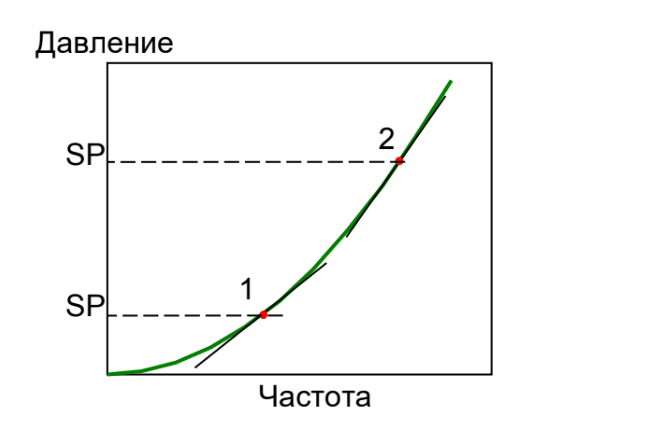
Напор (давление) пропорционален квадрату частоты вращения:
H ∼ n². Когда вы меняете задание по давлению, то вы и меняете коэффициент передачи в объекте. На рисунке ниже, проведенная касательная к характеристике насоса (зеленый цвет) позволяет определить коэффициент передачи. Угол наклона в точке 2 и 1 различный. Таким образом, после получения настроек систему лучше проверить на всем диапазоне заданий и возмущений.
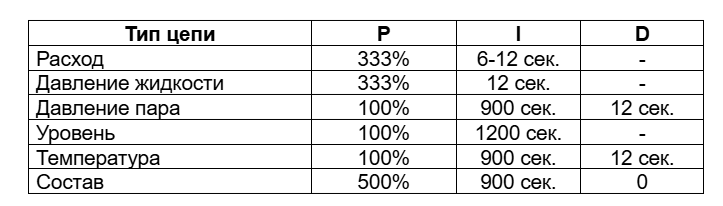
📌 Таблица стартовых настроек
Ниже приведены следующие типичные консервативные пусковые настройки (уставки), которые помогут избежать больших сбоев во время запуска.
Следует отметить, что если вы собираетесь стабилизировать при разных сигналах задания (SP), то качество переходного процесса может серьезно варьироваться. Для детального изучения методов настройки и проверки качества работы ПИД-регулятора рекомендуем ознакомиться с материалами по практической настройке ПИД-регулятора.
✅ Вывод
Таким образом, качество переходного процесса может сильно меняться при разных заданиях.
📌 Дополнительно по теме
Чтобы лучше понять работу ПИД-регулятора и методы его настройки, рекомендуем прочитать также:
• Принцип работы ПИД-регулятора
• Настройка ПИД-регулятора по методу Циглера–Никольса
📚 Источники и экспертность материала
📌 Источники и практический опыт
Оценка качества настройки ПИД-регуляторов основана как на теоретических подходах, так и на практическом анализе переходных процессов в реальных системах управления.
Для углубленного изучения темы можно использовать специализированную литературу по автоматизации технологических процессов.
Материал подготовлен при участии доцента кафедры автоматизации производственных процессов и электротехники Белорусского государственного технологического университета Д.А. Гринюка.



