
📌 Введение
Попытка просто сказать о сложном и объяснить принцип работы ПИД-регулятора простыми словами. В статье разберем, как работает ПИД-регулятор, что означают P, I и D и как применяется обратная связь в системах автоматизации.
В книгах по теории управления и автоматизации можно найти много интересных решений по регулированию технологических параметров: давления, расхода, температуры и т.д. Часто они демонстрируют лучшее качество работы, чем ПИД-регулятор.
Однако уже больше века ПИД-регулятор успешно применяется на практике и остается одним из самых распространенных решений в промышленной автоматизации. У этого регулятора много недостатков, качество регулирования не самое лучшее, но его универсальность и накопленный опыт использования обеспечивают очень высокую степень применимости.
🔁 Принцип работы ПИД-регулятора
Таким образом, понятие регулирования неотделимо от понятия обратной связи, поскольку именно через нее раскрывается принцип работы ПИД-регулятора. Понимание обратной связи — это основа того, как работает ПИД-регулятор.
Идея проста:
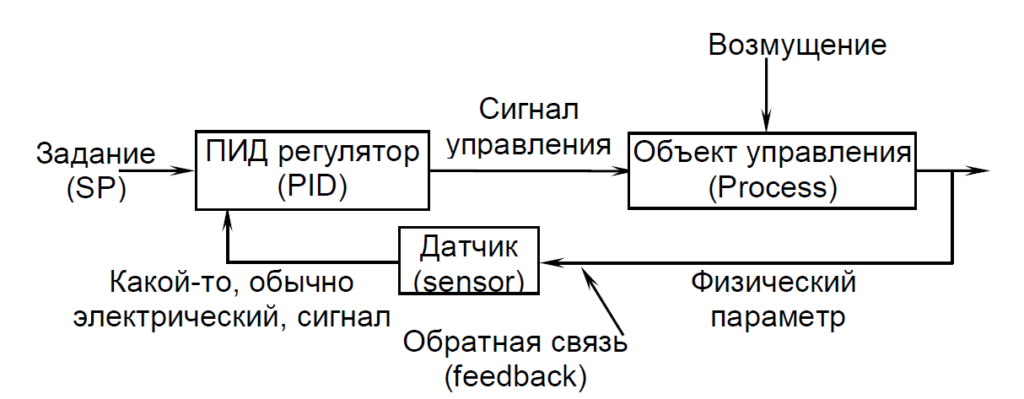
если у нас есть объект управления, например насос, который должен обеспечить постоянство давления в трубопроводе, то необходимо:
- установить датчик (датчик давления)
- преобразовать физический параметр в сигнал
- передать сигнал регулятору
Регулятор:
- сравнивает сигнал с заданием
- вычисляет ошибку
- принимает решение, как изменить сигнал управления
На рисунке представлена структурная схема системы регулирования с обратной связью.
С другой стороны, вместо ПИД-регулятора может быть человек. Посмотрел на шкальный мономер и заставил насос увеличить или уменьшить производительность. Так было на заре промышленной революции. Однако человеку нужно платить. Поэтому быстро нашли решение как сделать без человека.
Например, при управлении автомобилем тоже работает система с обратной связью за рулем автомобиля. Только «датчик » сложнее – это несколько приборов на панели. Если водитель видит снижение скорости, нажимает педаль газа, а наоборот отпускает. Когда водитель видит изменение рельефа дороги — это уже не обратная связь, а прямое управление. К рисунку выше это не имеет отношения.
⚠️ Почему не подходит дискретное управление
Можно заменить ПИД-регулятор простым алгоритмом:
- давление достигло верхнего уровня → насос выключили
- давление упало → насос включили
Но у такого решения есть серьёзные недостатки:
❌ Технические проблемы:
- колебания давления
- нестабильность процесса
❌ Проблемы оборудования:
- частые пуски → перегрев двигателя
- снижение срока службы
❌ Энергетические потери:
- энергия тратится на запуск, а не на полезную работу
💸 Экономические ограничения
Если увеличить разницу между уровнями включения и выключения:
- насос будет работать дольше
- потребуется поднимать жидкость выше
Но при увеличении высоты:
👉 эффективность центробежного насоса снижается
Это приводит к:
- дополнительному потреблению электроэнергии
- снижению общей эффективности системы
⚙️ ПИД-регулирование и ПЧ
Для регулирования давления с помощью ПИД требуется аналоговое управление.
Для регулирования давления с помощью ПИД-регулирования требуется аналоговое управление. При этом для регулировании давления в трубопроводе можно делать вариант с помощью установки клапана, а можно с помощью регулирования управления частотой вращения двигателя посредствам преобразователя частоты (ПЧ). Против первого варианта опять работает экономика. С этим вариантом двигатель вынужден будет работать на преодоление дополнительного сопротивления клапана. Это будет приводить к дополнительному нагреву самого двигателя и клапана. Электроэнергия будет расходоваться зря. Эксплуатационные затраты будут больше чем при использовании ПЧ.
В результате появления недорогих и надежных преобразователей частоты второй вариант стал доступен для всех. Особенно мощный толчок к использованию системы с ПЧ дало то, что производители преобразователей сейчас встраивают ПИД-регулятор непосредственно в ПЧ. Для небольших задач это самый оптимальный вариант. На больших предприятия ПИД-регулятор по ряду причин используется внешний. Но работа и настройка его от этого не меняется.
⚙️ Структура ПИД-регулятора
Чтобы понять принцип работы ПИД-регулятора, необходимо разобраться с его основными составляющими: P, I и D. На рисунке приведена упрощенная характеристика ПИД-регулятора.
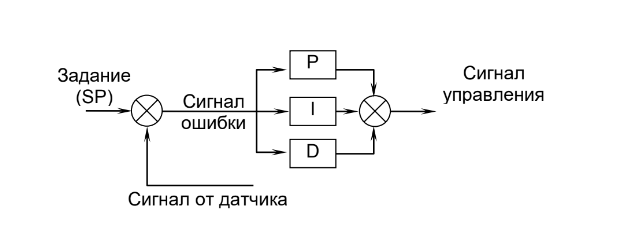
Упрощенная блок-схема, иллюстрирующая работу ПИД-регулятора 1
Здесь указаны только три основные настройки, через которые реализуется принцип работы ПИД-регулятора:
- Пропорциональная (P)
- Интегральная (I)
- Дифференциальная (D)
Ошибка просто умножается на одно, два или все рассчитанные действия P, I и D (в зависимости от того, какие из них включены). Затем полученные значения «ошибка x управляющие действия» суммируются и отправляются на выход контроллера.
Эти 3 режима используются в различных комбинациях:
- P — иногда используется
- PI — наиболее часто
- PID — для сложных задач
- PD — редко (например, сервоприводы)
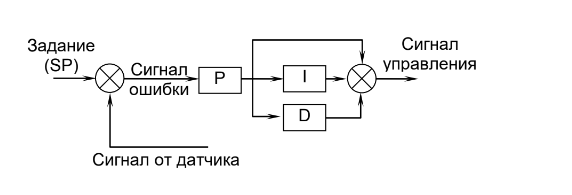
В реальных регуляторах настроек может быть больше. Еще одной проблемой является различные варианты реализации ПИД закона. В некоторых литературных источниках указывается на 18 вариантов реализации ПИД-закона. В том варианте, что на рисунке все три настройки независимы и параллельны. Но можно встретить часто вариант, что сигнал ошибки сначала умножается на коэффициент пропорциональности P, а только потом поступает на преобразование к интегральной и дифференциальной части.
Упрощенная блок-схема, иллюстрирующая работу ПИД-регулятора 2.
⚠️ Важное замечание
Одной из ключевых проблем является интегральная составляющая, которая может существенно влиять на устойчивость системы.
📌 Дифференциальная часть (производная)
Зайдите в диспетчерскую технологического завода и спросите оператора:
« Какова производная давления в реакторе №4?»
И обычно в ответ поступает следующее:
« Отвали, умник!»
Однако зайдите и спросите:
« Какова скорость изменения давления в реакторе №4?»
Оператор проанализирует динамику изменения давления и скажет что-то вроде:
« Примерно 5 кПа каждые 10 минут».
Он только что произвел вычисления по тренду давления!
Таким образом, производная — это просто математический термин, означающий скорость изменения. Вот и всё.
Таким образом, эта часть регулятора позволяет ему быстрее реагировать на изменение ошибки. Правда, ее редко используют. Основная проблема это шумы которые идут от датчика. Она их хорошо усиливает и исполнительный механизм постоянно в движении может быть от этого. Особенно это критично для клапанов, задвижек и т.д., которые передвигаются с помощью электродвигателей и сервоприводов.
📌 Интегральная часть
Кроме того, интегральная составляющая требует более подробного рассмотрения. Интегралы без математических выкладок. Здесь сложнее.
Стоит ли удивляться, что многие боятся понятия интегралов и интегрирования, это достаточно сложная тема.
Интеграл сигнала — это сумма всех мгновенных значений сигнала, начиная с момента начала отсчета и до момента его завершения.
Итак, если вам нужно построить график сигнала на основе тренда, и ваш сигнал регистрируется каждую секунду, и, допустим, вы измеряете температуру. Если наложить интеграл сигнала за первые 5 секунд, это будет выглядеть так:
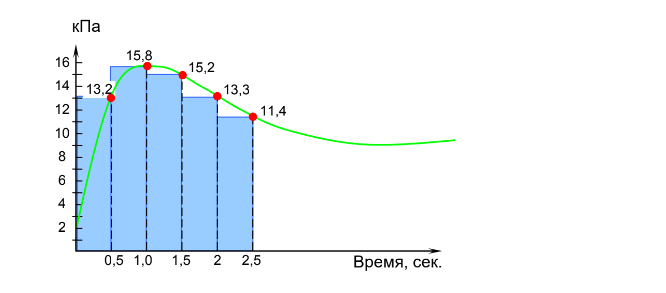
Зелёная линия — это ваше давление, красные точки — это места, где ваша система управления с определенным периодом измеряла значение физического параметра, а синяя область — это интеграл температурного сигнала. Это сумма 5 значений давления за интересующий вас период времени. В числовом выражении это сумма площадей каждого из синих прямоугольников:
(13,2 ⋅ 0,5)+(15,8 ⋅ 0,5)+(15,2 ⋅ 0,5)+(13,3 ⋅ 0,5)+(11,4 ⋅ 0,5) = 34,45 кПа⋅с
Любопытные единицы измерения (кило паскаль на секунды) объясняются тем, что давление необходимо умножить на время, но сами единицы не имеют значения.
Как вы, вероятно, помните из школы, интеграл оказывается площадью под кривой. В реальных системах мы получаем приближение к площади под кривой, которое, как видно из диаграммы, становится лучше по мере увеличения скорости дискретизации.
Интегральная составляющая в ПИД- регуляторе фактически такими расчетами как это было проделано для давление, а потом или умножает на Коэффициент интегрирования или делает деление на Время интегрирования. А что она делает зависит от производителя технического устройства реализации ПИД-регулятора. И здесь надо быть внимательным.
📌 Пропорциональное управление (П-регулятор)
Это базовый элемент, который лежит в основе настройки ПИД-регулятора. В режиме пропорционального управления контроллер просто умножает ошибку на коэффициент пропорционального усиления P, чтобы получить выходной сигнал контроллера.
Пропорциональное усиление — это параметр, который мы настраиваем для достижения желаемого качества от регулятора, работающего только с пропорциональным коэффициентом усиления.
Однако у П-регулятора есть одна важная проблема, и если бы не она, то можно было бы использовать только этот регулятор. Настраивать один параметр всегда легче, чем два, а тем более 3. А проблема этого регулятора в статической ошибке. При использовании П-регулятора почти всегда наблюдается статическая ошибка. Это значит, что физический параметр не будет соответствовать сигналу задания.
📌 ПИ-регулятор - идеальное сочетание
Если объединить пропорциональное и интегральное действие, мы получим простой ПИ-регулятор.
Сложность интегрального действия заключается в том, что оно может серьезно нарушить ваш процесс, если вы точно не знаете, какое количество интегрального действия нужно применить.
Хорошая методика настройки ПИД-регулятора точно рассчитает, какое значение интегрального действия необходимо применить для вашего конкретного процесса — подробные методы настройки, включая метод Циглера–Никольса, разобраны в отдельной статье — но как вообще регулируется это интегральное действие?
Введение интегральной составляющей устраняет статическую ошибку. Т.е. если есть несоответствие между сигналом задания и значением с датчика, то интегральная составляющая накапливать свое значение и будет заставлять исполнительный механизм менять свое значение (в случае ПЧ частоту вращения двигателя) пока ошибка не станет равной нулю.
📌 Регулировка интегрального действия
Регулировать количество интегральных действий можно, изменив параметр «минуты на повтор». Не очень интуитивно понятное название, не правда ли?
Откуда же взялось это странное название? Оно обозначает величину времени, за которое интегральное действие сравняется с пропорциональным действием.
Другими словами, если выходная мощность пропорционального блока на приведенной выше диаграмме составляет 20%, то время повторения — это время, за которое выходная мощность интегрального блока также достигнет 20%.
💡 Важная зависимость
- чем меньше «минут на повтор» → тем больше интегральное действие
- чем больше → тем слабее
Иными словами, чем меньше «минут на повтор», тем больше интегральное действие.
Для большей интуитивности многие контроллеры используют альтернативную единицу измерения «повторов в минуту» (коэффициент интегрирования), которая, очевидно, является обратной величиной «минут на повтор» (Время интегрирования).
Преимущество показателя «повторений в минуту» заключается в том, что чем он больше, тем больше результирующее интегральное действие.
📌 ПИД-регулятор – прогнозирование будущего
ПИ-регуляторы наиболее распространены и хорошо справляются со множеством задач. Они достаточно хорошо выполняют свою работу и упрощают процесс. Отлично.
Однако после настройки важно оценить, как система ведет себя в реальных условиях — это обычно делают по переходному процессу, который показывает качество настройки регулятора.
Но инженеры, будучи инженерами, всегда стремятся улучшить производительность.
Они делают это в ПИД-регуляторе, добавляя последний компонент: производную.
Таким образом, добавление производной может позволить вам увеличить коэффициенты усиления P и I, сохраняя при этом стабильность контура, что обеспечит более быструю реакцию и лучшие характеристики контура.
Если задуматься, производная улучшает работу контроллера, поскольку она прогнозирует то, что еще произойдет, проецируя текущую скорость изменения в будущее. Это означает, что она использует не текущее измеренное значение, а будущее измеренное значение.
Единицы измерения производной показывают, насколько далеко в будущее вы хотите заглянуть. Например, если производная составляет 20 секунд, то производная спроецирует текущую скорость изменения на 20 секунд вперед.
Главная проблема D-управления заключается в том, что если в сигнале присутствует шум (который выглядит как множество пиков с крутыми склонами), это сильно сбивает с толку алгоритм. Он анализирует наклон шумового пика и считает:
«Черт возьми! Этот процесс быстро меняется, давайте ускорим темп!!!»
А выходные сигналы управления скачут во все стороны, нарушая работу системы управления и «убивают» некоторые исполнительные механизмы.
Конечно, вы можете попытаться отфильтровать шум, но мой совет таков: если управление ПИ-регулятором не слишком медленное, не стоит беспокоиться о включении режима D.
✅ Выводы
1. ПИД-регулятор — это универсальный инструмент автоматизации, который:
- прост по идее
- гибок в применении
- широко используется в промышленности
- P — основа регулирования
- I — устраняет статическую ошибку
- D — ускоряет, но чувствителен к шумам
Несмотря на недостатки, он остаётся стандартом благодаря своей универсальности.
2. Можно фильтровать шум, но если ПИ-регулятор работает нормально — лучше не использовать D.3. На практике чаще всего используется ПИ-регулятор.
Таким образом, понимание принципа работы ПИД-регулятора позволяет не только разобраться в его логике, но и перейти к практической настройке.
📌 Дополнительно по теме
Если вы хотите перейти от теории к практике, рекомендуем ознакомиться с методами настройки ПИД-регулятора и способами проверки качества его работы:
• Практическая настройка ПИД-регулятора (методы Циглера–Никольса)
• Проверка качества настройки по переходному процессу
📚 Дополнительные материалы
Подробнее о теории автоматического управления можно прочитать в учебных материалах и специализированной литературе ПИД-регулятор.
Материал подготовлен при участии доцента кафедры автоматизации производственных процессов и электротехники Белорусского государственного технологического университета Д.А. Гринюка.



